
We wcześniejszych artykułach dotyczących dróg korowo-siatkowo-rdzeniowych opisywałem ich wpływ na funkcję kontroli posturalnej oraz regulacji napięcia mięśniowego. Są one niezbędne m.in. dla lokomocji, która będzie tematem dzisiejszego wpisu. Skoncentruję się na zależnościach pomiędzy lokomocją, kontrolą posturalną oraz regulacją napięcia mięśniowego.
Czym jest lokomocja?
Lokomocja jest zorientowanym na cel zachowaniem, które jest inicjowane przez korę mózgową (przetwarzanie wolicjonalne) lub układ limbiczny (przetwarzanie emocjonalne) (Takakusaki i wsp. (2013;2017)). Polecenia te są dalej transmitowane do ośrodków lokomotorycznych, które z kolei wysyłają impulsy do tworu siatkowatego. W tym miejscu są one integrowane i przesyłane do komórek rdzenia kręgowego (Brownstone i Chopek 2018)). Niezależenie od tego, który z systemów inicjuje ruch, to podłożem dla niego jest zapewnienie odpowiedniej kontroli posturalnej, do której zalicza się reakcje równoważne oraz regulację napięcia mięśniowego. Odpowiadają za to m.in. drogi zstępujące z pnia mózgu. Droga przedsionkowo-rdzeniowa odpowiada za ogólne napięcie posturalne, podczas gdy droga siatkowo-rdzeniowa „dostraja” napięcie poszczególnych mięśni (Takakusaki i wsp. (2013;2017)).
Badania (Takakusaki i wsp. (2016)) wykazały, że stymulacja tworu siatkowatego prowadzi do pojawienia się określonych wzorców ruchowych związanych z lokomocją, a także do zmian w napięciu mięśniowym. Zaobserwowano, że neurony, odpowiadające za jego kontrolę, jak i te, które generują wzorce oraz rytm lokomocji są ze sobą powiązane. Wyniki te popierają koncepcję, w myśl której odpowiedni poziom aktywności mięśni posturalnych jest niezbędny do zapoczątkowania oraz kontynuowania lokomocji.
Matsuyama i wsp. (2004) zwraca uwagę, że na lokomocję wpływa działanie wielu układów centralnego układu nerwowego. Przy czym podkreśla rolę połączeń korowo-siatkowo-rdzeniowo-interneuronalnych. Zapewniają one przepływ informacji pomiędzy kora mózgową, a także ośrodkami lokomocji do komórek rdzenia kręgowego. Pozwala to na inicjowanie, a także dostosowywania lokomocji do warunków środowiska (np. omijanie przeszkody). Autorzy zwracają uwagę na istotę kory mózgowej w kontekście lokomocji zorientowanej na cel. Droga siatkowo-rdzeniowa może również ułatwiać integrację i koordynację rytmicznej aktywności lokomotorycznej między kończynami i/lub kończynami i tułowiem, co jest niezbędne do opracowania automatycznych i synergicznych ruchów lokomotorycznych. Zapewnia to poprzez połączenia z interneuronami na każdym poziomie rdzenia kręgowego.
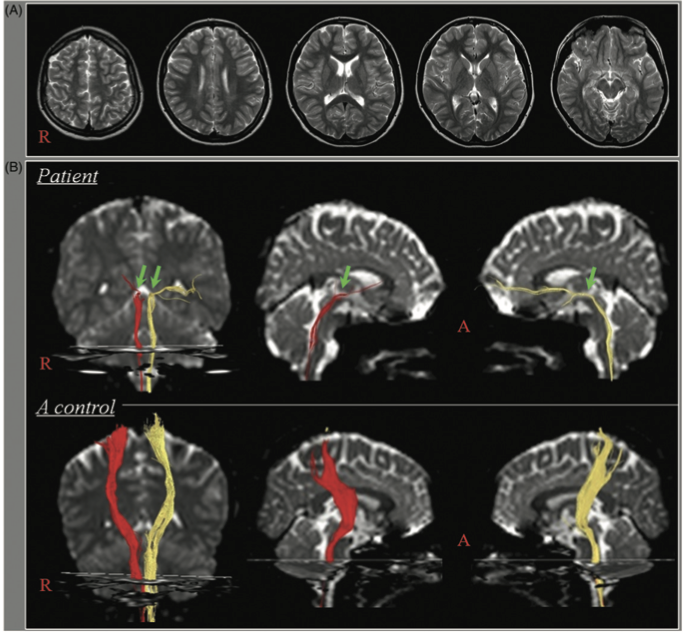
Bezpośredni wpływ drogi korowo-siatkowo-rdzeniowej, zarówno na regulację napięcia mięśniowego, jak i lokomocję przedstawia publikacja Kwon HG i wsp. (2014). Prezentują studium przypadku, w którym opisują pacjentkę z zaburzeniami chodu po łagodnym urazie czaszkowo-mózgowym (z ang. mild traumatic brain injury) w mechanizmie o charakterze whiplash. W wywiadzie zgłaszała osłabienie chwytu prawej ręki oraz zmniejszenie siły mięśniowej lewej ręki (po 3 sekundach trzymania przedmiotu). Zaobserwowano również niewielkie ubytki siły mięśniowej obu kończyn dolnych. 29 dni po wypadku zaobserwowała problemy z chodzeniem – zaczęła utykać na prawą nogę, a staw biodrowy i kolanowy ustawiały się w zgięciu. Ponowne badanie neurologiczne wykazało ubytki siły mięśniowej. Były one większe w stawach proksymalnych (staw barkowy i biodrowy) oraz dotyczyły bardziej mięśni kończyn dolnych niż górnych. Badanie MRI nie wykazało żadnych istotnych ubytków, natomiast badanie DTT wykazało uszkodzenie obu dróg korowo-siatkowo-rdzeniowych (przerwanie ciągłości) na poziomie śródmózgowia. Odnotowano również częściowe przerwanie prawej drogi korowo-rdzeniowej na poziomie podkorowym. Zakwalifikowano to jako pourazowe uszkodzenie aksonalne (z ang. traumatic axonal injury (TAI)). Ryc. nr 1 przedstawia wyniki MRI i DTT.
- Podsumowując, lokomocja jest czynnością zorientowaną na cel, inicjowana wolicjonalnie bądź emocjonalnie. Sugeruje to, aby w trakcie reedukacji chodu pacjenta uwzględniać zadania, cele, a także emocje. Aby chód mógł przebiegać płynnie niezbędna jest prawidłowa kontrola posturalna oraz regulacja napięcia mięśniowego. Są to procesy koordynowane przez różne ośrodki centralnego układu nerwowego, przy czym droga korowo-siatkowo-rdzeniowa spełnia rolę integrującej postawę, napięcie mięśniowe i wzorce lokomocji (MacKinnon (2008)).
Pierwszy krok.
Niezbędnym warunkiem rozpoczęcia lokomocji jest przyjęcie postawy stojącej. Napięcie mięśni prostowników jest niezbędne do poruszania się, ponieważ musi być wytwarzana odpowiednia siła, aby wspierać ciało i napędzać kończyny do przodu (Brownstone i Chopek 2018)). Następnie ich praca wspierana jest aktywnością zginaczy, w celu stawiania kolejnych kroków. Systemy regulacji napięcia mięśniowego i lokomocji muszą ze sobą współdziałać i być skoordynowane (Grillner i El Manira (2020)).
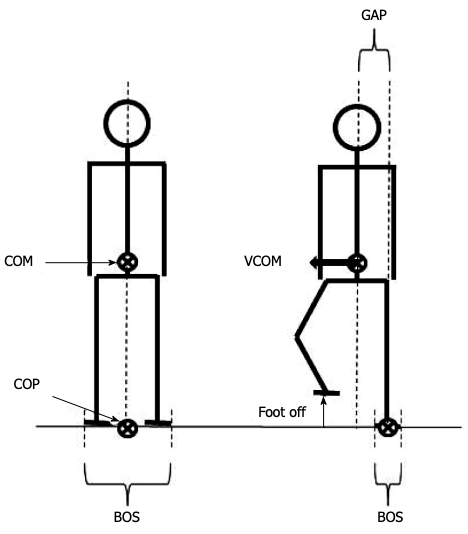
Spokojna pozycja stojąca wymaga pionowego rzutu środka ciężkości na płaszczyznę podparcia. W tym przypadku odnosi się do obszaru stóp/stopy, która ma kontakt z podłożem. W chwili oderwania którejś z nich, aby wykonać krok w pożądanym kierunku, równowaga w płaszczyźnie czołowej zostanie zachwiana (Ryc. nr 2). Jest to wynikiem zmniejszenia szerokości płaszczyzny podparcia. Jeśli środek masy nie zostanie przesunięty powyżej nowej podstawy podparcia, całe ciało opadnie w kierunku nogi zamachowej podczas fazy inicjacji chodu (Yiou E i wsp. (2017)). Ośrodkowy układ nerwowy podejmuje pewne działania, aby nie doszło do upadku. Zostaną one przedstawione poniżej.
Inicjacja chodu odpowiada okresowi przejściowemu między spokojnym staniem a kontaktem stopy nogi zamachowej z podłożem. Podzielona jest na trzy fazy (Yiou i wsp. (2016;2017)(Ryc. nr 3.):
- faza posturalna – faza wyprzedzającego dostosowania posturalnego – APA.
- faza oderwania stopy – kończy się w momencie oderwania palców (masa ciała jest przenoszona na nogę wykroczną).
- faza egzekucji (wykonania) – kończy się w momencie kontaktu stopy z powierzchnią podparcia
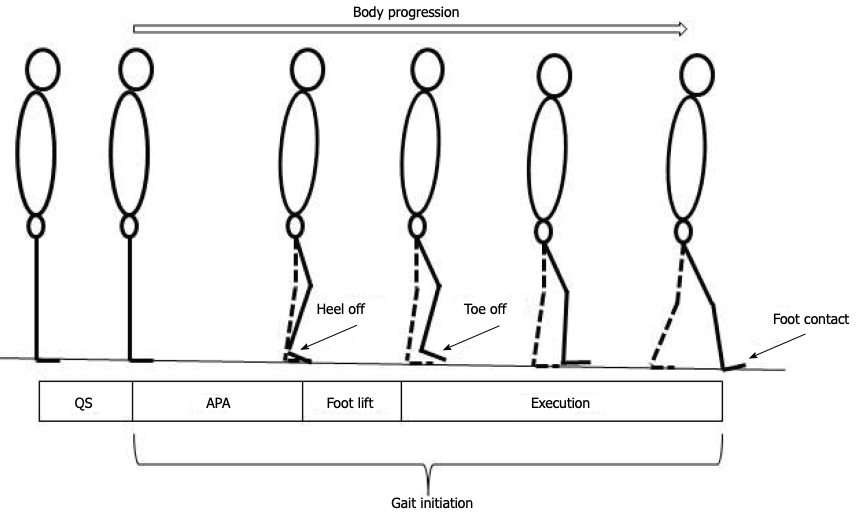
| Body progression – progresja ciała; Heel off – oderwanie pięty; Toe off – oderwanie palucha; Foot contact – kontakt stopy; QS – quiet standing-spokojna pozycja stojąca; APA – anticipatory postural adjustment – wyprzedzające dostosowanie posturalne; Foot lift – oderwanie stopy, Execution – wykonanie; Gait initiation – rozpoczęcie chodu. |
Faza posturalna ma na celu zapewnienie odpowiedniej pozycji ciała, która ma zniwelować skutki potencjalnej utraty równowagi. Centralny układ nerwowy planuje to z wyprzedzeniem. Tuż przed ruchem obserwuje się przemieszczania ciała, zarówno w płaszczyźnie strzałkowej jak i czołowej.
W kierunku przednio-tylnym obserwuje się przesunięcie środka nacisku do tyłu, co ma wzmagać początkowe siły napędowe. Jest to niezbędne dla osiągnięcia odpowiedniej prędkości i długości kroku (Yiou i wsp. (2017); Lu i wsp. (2017)).
Farinelli i wsp. (2021) udowodnili, że tuż przed przesunięciem środka nacisku dochodzi do zmian w aktywności EMG mięśni tułowia. Zaobserwowano wzmożenie aktywności m. prostego i skośnych brzucha po stronie nogi inicjującej krok. Wyciszeniu ulega aktywność mięśni prostowników grzbietu w odcinku piersiowym i lędźwiowym, po tej samej stronie. Natomiast po stronie nogi podporowej dochodzi do pobudzenia mięśni prostowników tułowia. Ma to na celu zapewnienie odpowiedniej stabilności w obrębie tułowia i miednicy, dzięki czemu nie dochodzi do utraty równowagi podczas inicjacji ruchu. Przesunięcie środka nacisku jest generowane przez mięśnie podudzia. Aktywność mięśni płaszczkowatych, które są tonicznie aktywne podczas stania, zostaje wyhamowana. Następnie dochodzi do pobudzenia mięśni piszczelowych przednich.
W płaszczyźnie przyśrodkowo-bocznej APA obejmują przesunięcie środka nacisku w kierunku nogi zamachowej, co promuje przesunięcie środka masy w przeciwnym kierunku, tj. w kierunku w kierunku nogi podporowej (Yiou i wsp. (2017)). Ruchy środka nacisku obrazuje ryc. nr 4.
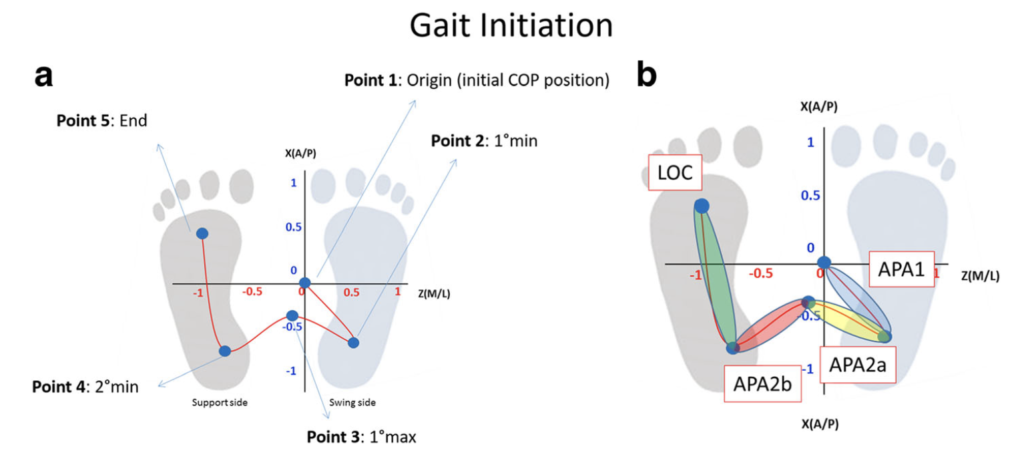
| Legenda A: |
| Pkt 1 – Początek (początkowa pozycja CoP). Pkt 2 – Pierwsze minimum (1 min): minimalna tylna pozycja CoP na nodze po stronie wymachu. Pkt 3 – Pierwsze maksimum (1max): Maksymalna przednia pozycja podczas przesunięcia CoP z nogi zamachowej do nogi podporowej. Pkt 4 – Drugie minimum (2 min) minimalna tylna pozycja CoP na nodze podporowej. Pkt 5 – Koniec (ostateczna pozycja CoP). Support side – strona podporowa. Swing side – strona zamachowa |
| Legenda B: |
| APA1 – rozpoczyna się na początku ruchu i kończy w momencie zwolnienia obciążenia pionowego stopy – ten APA znajduje się między początkiem a pierwszym minimum. Reprezentuje przesunięcie CoP w kierunku bocznym i tylnym razem w kierunku pięty stopy zamachowej. APA2 – rozpoczyna się w momencie zwolnienia stopy zamachowej, kończy się w momencie oderwania palców stopy zamachowej i reprezentuje boczne przesunięcie CoP w kierunku stopy nogi podoprowej . APA2 został podzielony na dwie dodatkowe podfazy: APA2a i APA2b definiowały odpowiednio ruch antycypacyjny pomiędzy pierwszym minimum i pierwszym maksimum oraz ruch antycypacyjny pomiędzy pierwszym maksimum i drugim minimum. LOC – faza lokomotoryczna – znajduje się pomiędzy drugim minimum a końcem trajektorii COP. |
Integracja wielu składowych – przykład kliniczny.
Przykładem integracji kontroli posturalnej, lokomocji i regulacji napięcia mięśniowego może być poniższy przykład pacjenta w fazie przewlekłej udaru mózgu prawej półkuli mózgu w wyniku czego doszło do niedowładu połowiczego lewostronnego. Zdjęcia przedstawiają fazy podporu, zarówno na kończynie bezpośrednio jak i pośrednio zajętej. Można zaobserwować zależności pomiędzy liniowością kończyny i tułowia oraz kontrolą pozycji, a napięciem mięśniowym kończyny górnej. Zdjęcia pochodzą z początkowej i późniejszej fazy terapii (różnica ponad 1 roku).
Rycina 5 i 6 przedstawia fazę podporu na lewej kończynie dolnej. Na zdjęciu 5 można zaobserwować duże przechylenia tułowia w lewą stronę. Wynika to ze słabej aktywności prostowników lewej kończyny dolnej i braku możliwości zbudowania liniowego ustawienia tułowia w relacji do kończyny dolnej. Można zaobserwować reakcję stowarzyszoną lewej kończyny górnej. Zdjęcie 6 pokazuje również fazę podporu na lewej kończynie dolnej po pewnym okresie terapii. Można zauważyć, że przesunięcie tułowia jest o wiele mniejsze, a sam tułów jest bardziej wyprostowany. W efekcie reakcja stowarzyszona jest mniejsza. Podobne zależności przedstawia zdjęcie 7 i 8, przy czym dotyczą fazy podporu na prawej kończynie dolnej.


Która noga pierwsza po udarze?
Delafontaine i wsp. (2019) w swojej pracy opisali, jak wygląda kontrola posturalna podczas inicjacji chodu u osób po udarze mózgu. Stwierdzono, że faza przygotowania posturalnego u wszystkich pacjentów jest zaburzona. Wykazano zmiany we wzorcu i parametrach czasowo-przestrzennych w porównaniu z osobami zdrowymi oraz różnice w inicjowaniu chodu nogą bezpośrednio lub pośrednio zajętą. Inicjowanie chodu jest ułatwione, gdy noga pośrednio zajęta jest używana jako noga podporowa, ponieważ osłabienie nogi niedowładnej utrudnia utrzymanie ciężaru ciała podczas nadchodzącej fazy podporu. Nietypowe wzorce APA były obserwowane częściej, kiedy badani mieli zacząć chód nogą pośrednio zajętą. Autorzy wskazują, że wydłużenie czasu przygotowania posturalnego mogło być związane z lękiem przed obciążaniem kończyny niedowładnej. Centralny układ nerwowy miał problem z zapewnieniem odpowiedniej stabilności.
Kolejnymi czynnikami mogło być opóźnienie „wyciszenia” mięśnia płaszczkowatego oraz aktywacji piszczelowego przedniego. Niższa amplituda APA podczas stawiania pierwszego kroku może skutkować odpowiednio niższą stabilnością i niższą prędkością chodu. Może to wynikać z osłabienia mięśni posturalnych lub odzwierciedlać adaptację do zaburzeń równowagi.
Potwierdzono również wyniki badań wskazujących skrócenie czasu trwania fazy wymachu, długości kroku, prędkości chodu i wielkości siły napędowej podczas inicjowania chodu nogą pośrednio zajętą. Efekty te mogą być wynikiem zmniejszonej siły zginaczy podeszwowych, zginaczy biodra i prostowników biodra po stronie niedowładnej, co może leżeć u podstaw niezdolności do utrzymania masy ciała. Niezdolność do prawidłowego przeniesienia środka ciężkości ponad niedowładną nogę podczas fazy wykroku może wyjaśniać wyższy stopień niestabilności obserwowany podczas startu nogą pośrednio zajętą jako pierwszą.
Warto zwrócić uwagę na jeszcze jedną kwestię. Aktywność prostowników kończyny podporowej jest uzależniona od nadchodzącej informacji sensorycznej. Informacje z proprioceptorów w mięśniach prostowników regulują przejście z fazy podporu do fazy przeniesienia. Sygnały we wrzecionach Ib z narządu ścięgnistego w mięśniach prostowników stawu skokowego hamują homonimiczne motoneurony w spoczynku, podczas gdy pobudzają motoneurony prostowników podczas fazy podporu (Takakusaki (2017)).
- Podsumowując, zainicjowanie kroku nogą pośrednio zajętą jest trudne dla pacjentów. Wiąże się to z wymaganiem w zakresie kontroli posturalnej i mechanizmami APA po stronie kończyny podporowej (w tym przypadku niedowładnej). Wymaga to również odpowiedniego poziomu siły mięśniowej i zdolności regulacji napięcia mięśni, szczególnie prostowników kończyny dolnej i tułowia. Warto wdrożyć zadania torujące te aktywności, szczególnie w pozycji stojącej. Warto również uwzględnić aktywności mięśni stopy, zwracając uwagę na ich siłę oraz elastyczność, jako potencjalne źródło informacji sensorycznej.
Bibliografia:
- Brownstone RM, Chopek JW. Reticulospinal Systems for Tuning Motor Commands. Frontiers in neural circuits. 2018;18:12:30.
- Cimolin V, Cau N, Galli M, Santovito C, Grugni G, Capodaglio P. Gait initiation and termination strategies in patients with Prader-Willi syndrome. Journal of NeuroEngineering and Rehabilitation. 2017;14(1):44.
- Delafontaine A, Vialleron T, Hussein T, Yiou E, Honeine J-L, Colnaghi S. Anticipatory Postural Adjustments During Gait Initiation in Stroke Patients. Frontiers in neurology. 2019;10:352.
- Farinelli V, Bolzoni F, Marchese SM, Esposti R, Cavallari P. A Novel Viewpoint on the Anticipatory Postural Adjustments During Gait Initiation. Frontiers in human neuroscience. 2012;11:15:709780.
- Grillner S, El Manira A. Current principles of motor control, with special reference to vertebrate locomotion. Physiological Reviews. 2020;100:271-320.
- Kwon HG, Jang SH. Delayed gait disturbance due to injury of the corticoreticular pathway in a patient with mild traumatic brain injury. Brain Injury. 2014;28(4):511-514.
- Lu Ch, Amundsen-Huffmaster SL, Harvey JC, MacKinnon CD. Anticipatory postural adjustments patterns during gait initiation across the adult lifespan. Gait Posture. 2017;57:182-187.
- MacKinnon CD. Sensorimotor anatomy of gait, balance, and falls. Handbook of Clinical Neurology. 2018;159:3-26.
- Matusyama K, Mori F, Nakajima K, Drew T, Aoki M, Mori S. Locomotor role of the corticoreticular-reticulospinal-spinal interneuronal system. Progress in Brain Research. 2004; 143:239-249.
- Takakusaki K. Neurophysiology of Gait: From the Spinal Cord to the Frontal Lobe. Movement disorders: official journal of the Movement Disorder Society. 2013;28(11):1483-1491.
- Takakusaki K, Chiba R, Nozu t, Okumura T. Brainstem control of locomotion and muscle tone with special reference to the role of the mesopontine tegmentum and medullary reticulospinal systems. Journal of neural transmission. 2016;123(7):695-729.
- Takakusaki K. Functional Neuroanatomy for Posture and Gait Control. Journal of Movement Disorders. 2017;10(1):1-17.
- Yiou E, Artico R, Teyssedre CA, Labaune O, Fourcade P. Anticipatory Postural Control of Stability during Gait Initiation Over Obstacles of Different Height and Distance Made Under Reaction-Time and Self-Initiated Instructions. Frontiers in human neuroscience. 2016;10:449.
- Yiou E, Caderby T, Delafontaine A, Fourcade P, Honeine J-L. Balance control during gait initiation: State-of-the-art and research perspectives. World Journal of Orthopedics. 2017;18;8(11):815-828.